软件版本
Isaac Sim 5.0
系统环境
Ubuntu 22.04
问题描述
尊敬的开发者:
您好,我希望导入不同的集合体进行机械臂的末端接触,因此我通过建模step文件,再转换为usd文件导入,并在sim app中定义了材料,包括摩擦、弹性、计算方式等。但结果和通过sim内置的CuboidCfg产生的效果区别很大
视频效果如下:其中绿色是CuboidCfg,这是我想要的结果,白色是usd导入得到的
contact.zip (2.7 MB)
其中白色usd文件如下,但是复现demo的代码提取比较麻烦,您看这样能知道问题出在什么地方吗?
k_x_part1.zip (4.1 KB)
而且面对我导入的物体,会在定义力传感器时
contact_forces = ContactSensorCfg(
prim_path=“{ENV_REGEX_NS}/Robot/end_tool”,
update_period=0.0, # 每物理步都更新(200Hz)
history_length=6, # 保留最近6次接触数据
debug_vis=True , # 显示接触力矢量
max_contact_data_count_per_prim = 32,
track_contact_points =True,
filter_prim_paths_expr =[
“{ENV_REGEX_NS}/Workpiece”,
“{ENV_REGEX_NS}/Workpiece_table”,
], # 只检测与工件和工作台的接触
track_pose = True
)
报:GPU contact filter for collider ‘/World/envs/env_0/Workpiece’ is not supported。是本身对这种网格的碰撞就不支持吗?
Hi explorer_s,
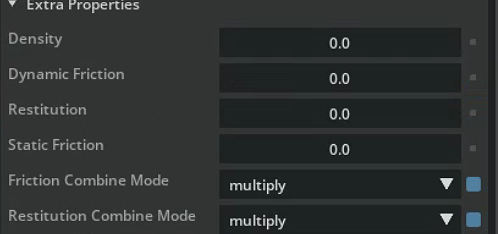
截图的配置是sim里usd导入的么,还是lab里CuboidCfg的?正常不应该都是0,几个尝试建议:
1)如果density等参数都是0,相当于空材质,需要和cuboidcfg里的参数对齐.
2)白色usd里的mesh,mesh01看起来是collision mesh,是不是重复了, 对应的Approximation 是convexDecomposition, CuboidCfg一般默认是box collider,你可以在绿色的usd确认下,保持一样的approximation.