我在使用jetson orinano设备 deepstream7.0。
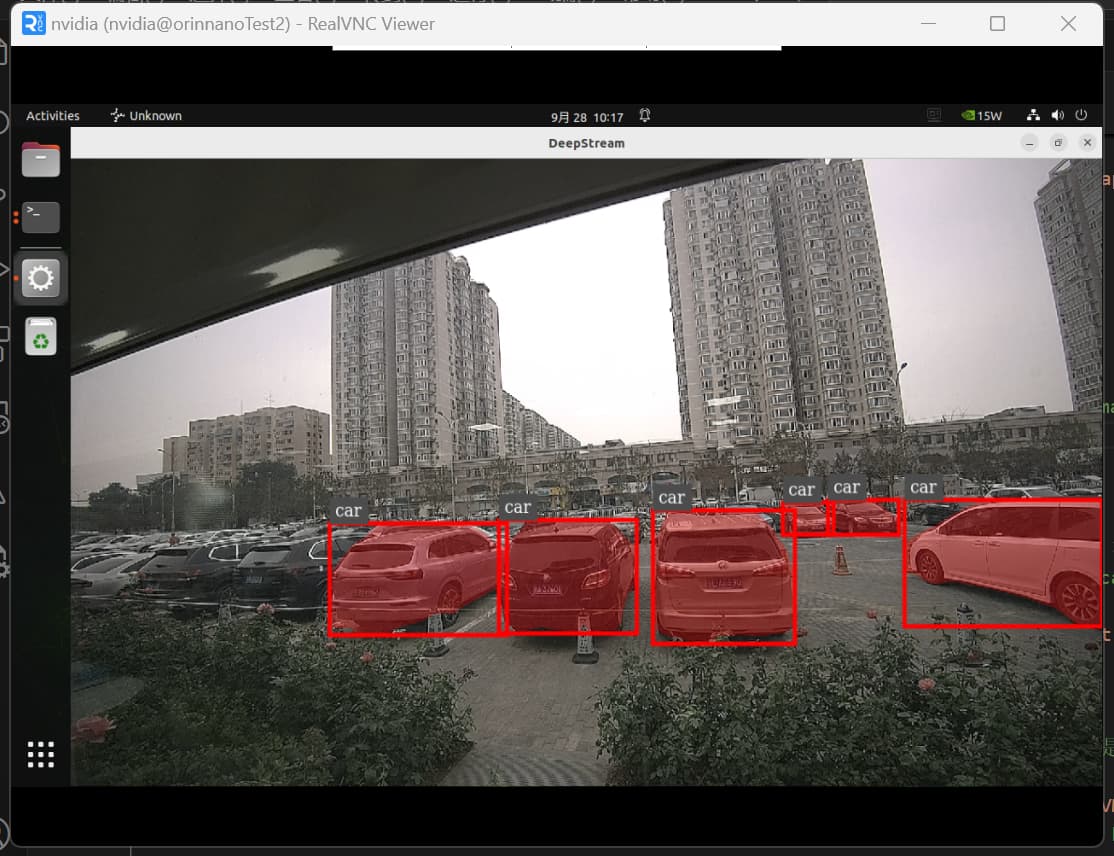
使用 deepstream-app -c deepstream_app_config.txt 来调用yolov8seg模型时,出现的结果如下:
下面是./DeepStream-Yolo-Seg/config_infer_primary_yoloV8_seg.txt:
[property]
gpu-id=0
net-scale-factor=0.0039215697906911373
model-color-format=0
onnx-file=yolov8s-seg.onnx
model-engine-file=yolov8s-seg.onnx_b1_gpu0_fp32.engine
#int8-calib-file=calib.table
labelfile-path=labels.txt
batch-size=1
network-mode=0
num-detected-classes=80
interval=0
gie-unique-id=1
process-mode=1
network-type=3
cluster-mode=4
maintain-aspect-ratio=1
symmetric-padding=1
#workspace-size=2000
parse-bbox-instance-mask-func-name=NvDsInferParseYoloSeg
custom-lib-path=nvdsinfer_custom_impl_Yolo_seg/libnvdsinfer_custom_impl_Yolo_seg.so
output-instance-mask=1
segmentation-threshold=0.5
[class-attrs-all]
pre-cluster-threshold=0.25
topk=100
这个显示效果很好掩码是半透明的 而且覆盖在目标区域上,但我用python 使用了以下元素想要复现这个效果:nvarguscamerasrc-nvvidconv-capsfilter-tee-queue-nvstreammux-nvinfer-nvdsosd-nvjpegenc-appsink (调用csi摄像头并实时推理后以输出mjpeg流)。我在nvdsosd加了一个探针,从元数据里找出掩码的轮廓并绘制在图像帧上,函数代码如下。但我认为这不是一个很好的方法,因为我找不到能直接填充掩码区域为半透明颜色的函数,所以我采用自己画点绘制的方法。这很慢非常慢非常非常卡顿,无法正常工作。如下图所示。

def parse_seg_mask_from_meta(frame_meta, obj_meta):
# 获取展平的浮点数置信度掩码
data = obj_meta.mask_params.get_mask_array()
# 获取掩码的高度和宽度
mask_height, mask_width = obj_meta.mask_params.height, obj_meta.mask_params.width
# 将一维数据重塑为 2D 浮点数掩码
confidence_mask = data.reshape((mask_height, mask_width))
# 获取物体边界框参数
bbox_left = obj_meta.rect_params.left
bbox_top = obj_meta.rect_params.top
bbox_width = obj_meta.rect_params.width
bbox_height = obj_meta.rect_params.height
# 计算缩放因子,将掩码大小映射到边界框大小
scale_x = bbox_width / mask_width
scale_y = bbox_height / mask_height
# 设置阈值,将置信度掩码转换为二值掩码
threshold = 0.5
binary_mask = (confidence_mask > threshold).astype(np.uint8)
# 获取显示元数据以在帧上绘制
batch_meta = frame_meta.base_meta.batch_meta
display_meta = pyds.nvds_acquire_display_meta_from_pool(batch_meta)
# 用于在掩码区域进行涂色
color = (0, 255, 0) # 绿色填充,可以根据需要更改
# 创建一个列表来存储所有要绘制的点
points_to_draw = []
# 遍历掩码并将识别物体区域映射到帧上
for y in range(mask_height):
for x in range(mask_width):
if binary_mask[y, x] == 1: # 如果掩码中该点的值为1,则表示物体区域
xc_original = int(bbox_left + x * scale_x)
yc_original = int(bbox_top + y * scale_y)
points_to_draw.append((xc_original, yc_original))
# 统一更新显示元数据,而不是在每个点处都调用
for point in points_to_draw:
xc_original, yc_original = point
if display_meta.num_circles >= MAX_ELEMENTS_IN_DISPLAY_META:
pyds.nvds_add_display_meta_to_frame(frame_meta, display_meta)
display_meta = pyds.nvds_acquire_display_meta_from_pool(batch_meta)
# 设置圆形参数,绘制成小圆点,模拟涂色
circle_params = display_meta.circle_params[display_meta.num_circles]
circle_params.xc = xc_original
circle_params.yc = yc_original
circle_params.radius = 2
circle_params.circle_color.red = 0.0
circle_params.circle_color.green = 1.0 # 绿色
circle_params.circle_color.blue = 1.0
circle_params.circle_color.alpha = 0.05
display_meta.num_circles += 1
# 将display_meta添加到帧中
pyds.nvds_add_display_meta_to_frame(frame_meta, display_meta)
后来我了解官方示例代码里关于deepstream-segmentation的python示例程序,我了解到它使用了nvsegvisual这个专门用来画掩码的元素,这是跑通示例代码(unet模型)后呈现的效果,我注意到颜色都是不透明的,而且我没法在这个nvsegvisual元素里改颜色。并且我将示例代码里的infer配置文件改成上面我使用的yolob8seg模型 ,跑出来的结果未输出掩码。所以我猜测deepstream-app -c 这个命令来使用yolov8seg模型也不是使用单位nvsegvisual这一元素?或者它是怎么使用的。

所以我在此寻求帮助:
1.请问deepstream-app -c config.txt 这一命令是使用了什么元素出现的半透明掩码覆盖在目标区域 并且响应速度很快的效果。
2.nvsegvisual组件如何更改掩码的颜色和半透明程度。
3.为什么使用 deepstream_python_apps/apps/deepstream-segmentation/deepstream_segmentation.py at master · NVIDIA-AI-IOT/deepstream_python_apps (github.com) 这个示例代码 改成yolov8seg的配置文件,跑出来后无掩码呈现。