硬件环境
Workstation
软件版本
Isaac Sim 5.1.0
系统环境
Ubuntu 22.04
问题描述
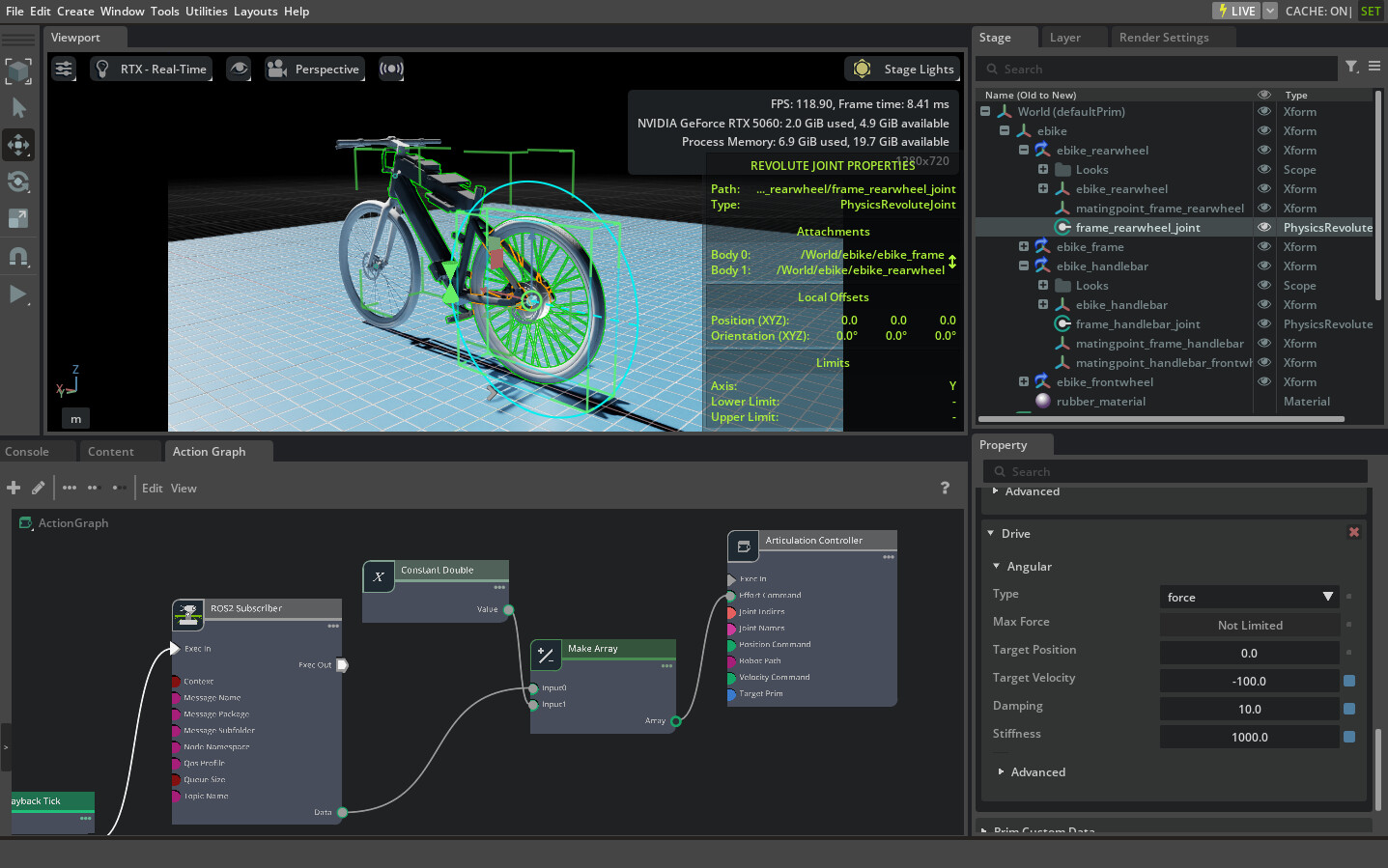
1、我需要在isaac sim中建立一个力矩驱动的关节。我设置了一个revolute joint并添加了angular drive,在property中的drive选项中,type选择accleration,target velocity输入-100,damping输入5.0,stiffness输入0.1(其余选项均为默认),我成功驱动了该关节并令机器人运动,但我在type选择force,经测试其他选项无论输入什么都无法驱动机器人。
2、我使用ros2发布了一个力矩话题,在isaac sim里订阅该话题并使用该值控制上述关节。我使用articulation controller并将力矩话题数据输入到effort command上,这正确吗?目前关节无任何反应,我该如何正确使用力矩话题数据驱动那个关节?
错误日志
无