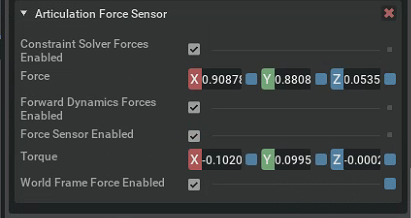
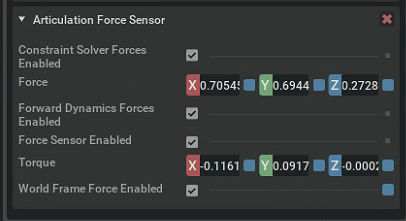
我从官网上了解到读取力的api存在问题弃用了,我以为只是读取有问题,但按我的实际实验来看,力传感器本身就存在问题吗?2022版本中的力传感器是不是不能用呀,那这个版本中的contact sensor存在问题吗?我想知道不用articulation force sensor的情况下,我还能通过什么在2022版本中得到六维力信息,非常感谢回答!
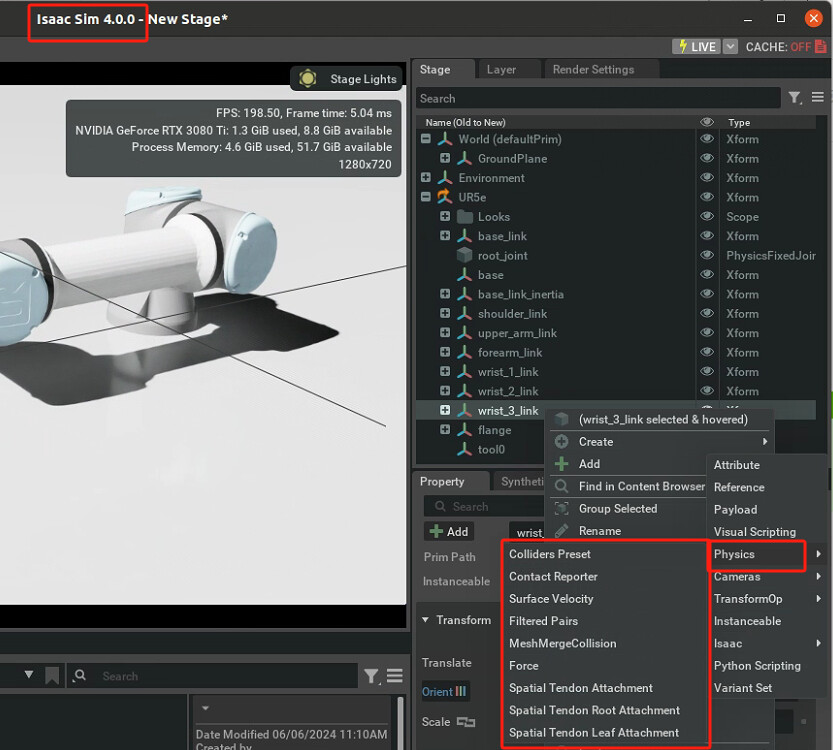
你好,我在2023.1.1版本上没有找到articulation force sensor,我看官网上关于添加这个传感器的方法应该一直没变,但是在选中刚体后,右击“add"→”physics“并没有articulation force sensor这个选项,是换了其他位置吗?官网上并未提及。谢谢回答!